A mobile robot is a machine controlled by a program that use sensors i.e. IoT Devices to identify its surroundings and move around its environment. Mobile robot functions using a combination of artificial intelligence (AI) and elements such as wheels, motor and NodeMCU.
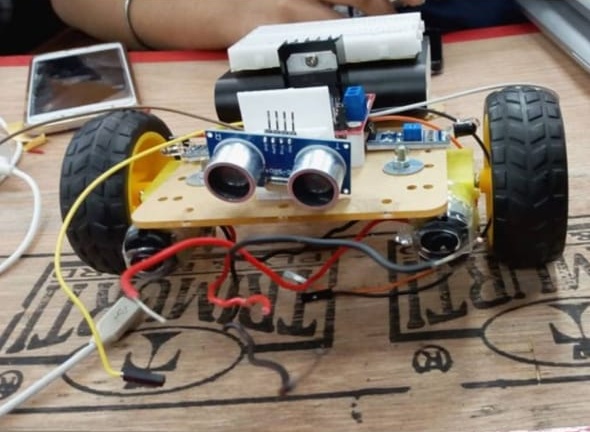
First, we assembled the whole robot and connected HC-SR04 ultrasonic sensor with NodeMCU for measuring distance on its front. HC-SR04 ultrasonic sensor is composed of ultrasonic transmitter, ultrasonic receiver and a control circuit. HC-SR04 ultrasonic transmitter transmits ultrasound waves at 40,000 Hz. Transmitted waves bounce back if they hit any flat surface/object in their path. Bounced back waves reaches the ultrasonic receiver. Ultrasonic receiver receives the bounced back waves and notifies the control circuit about it. Control circuit than calculates the time taken by waves to reach back after transmission. Time is than manipulated to approximate the distance travelled by waves or what is the distance between the sensor and the object? from which ultrasound waves bounced back.
Then, for obtaining training data , we moved the robot through an app built by us and stored the data of left wheel and right wheel distance from obstacle whenever robot was turned to avoid it.
This data was used in training the bot using Linear separatrix algorithm. Finally, our bot was now ready to be tested in the world full of obstacles and its footage could be used for surveillance.
The video of the MoBot working can be seen below: